KITS manos de Robots configurados
FPS AUTOMATION fabrica y diseña todos los componentes para montar su mano de robot.
Disponemos de KIT de manos preconfiguradas que se adaptan a diferentes medidas de piezas al mejor precio posible
Llámenos para pedirnos información y precio
Descargas
Preguntas frecuentes de los kits de manos de robots EOAT para la industria del plástico
Son soluciones modulares diseñadas para la manipulación automatizada y eficiente de piezas plásticas, a menudo con componentes personalizables para adaptarse a las necesidades específicas de agarre.
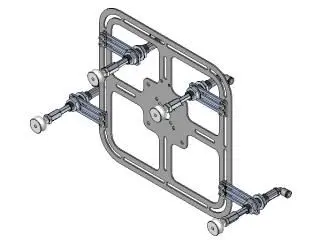
Los kits de manos de robots son conjuntos de componentes estandarizados y modulares (perfiles, elementos de unión, pinzas, ventosas, sensores, etc.) que permiten a los transformadores de plásticos construir y configurar rápidamente herramientas de fin de brazo (EOAT) para sus robots industriales. Su propósito es sujetar, mover y colocar de forma fiable y precisa una amplia gama de productos plásticos, desde piezas recién moldeadas y aún calientes hasta productos acabados y empaquetados, optimizando los tiempos de ciclo y garantizando una manipulación cuidadosa que evite deformaciones o daños.
En la industria del plástico, los tipos de garras o pinzas robóticas utilizados varían en función de la forma, el peso y la delicadeza de las piezas a manipular. Los kits suelen incluir:
- Garras mecánicas (pinzas): Utilizan dedos que se abren y cierran para sujetar objetos por presión. Pueden ser neumáticas o eléctricas, y sus dedos a menudo se diseñan a medida para adaptarse perfectamente a la forma de la pieza, asegurando un agarre seguro.
- Garras de vacío (ventosas): Son muy comunes para manipular piezas con superficies planas o ligeramente curvas. Utilizan succión para levantar y mover productos, siendo ideales para artículos ligeros o delicados que podrían dañarse con la presión mecánica.
- Garras blandas: Ofrecen un sistema de agarre innovador diseñado para la manipulación de piezas con gran delicadeza, adaptándose a formas irregulares sin dañarlas.
- Componentes modulares: Los kits consisten en elementos base, perfiles y accesorios que se combinan para crear una herramienta multipinza que puede integrar diferentes tipos de agarre (mecánico y por vacío, por ejemplo) en el mismo útil terminal.
Los kits de manos de robots tienen numerosas aplicaciones en la industria del plástico, permitiendo la automatización de procesos que antes podían considerarse imposibles o requerían manipulación manual.
- Manipulación en moldeo: Extracción de piezas recién inyectadas o sopladas de los moldes, a menudo mientras aún están calientes.
- Inspección de productos: Sujeción y posicionamiento de piezas para sistemas de visión artificial u otros métodos de control de calidad.
- Post-procesamiento: Traslado de piezas a estaciones de corte, taladrado o ensamblaje.
- Empaquetado y paletizado: Organización y apilamiento de productos plásticos acabados en cajas o palets con gran velocidad y precisión.
- Logística interna: Carga y descarga de máquinas y transporte de materiales dentro de la línea de producción.
- Colaboración humano-robot: Uso de garras en robots colaborativos (cobots) que trabajan junto a operarios humanos en tareas de manipulación.
Características

Componentes
Línea completa de accesorios para la realización de las manos de robot EOAT. La línea es ideada y realizada para ser completamente intercambiable con los constructores principales europeos
Descargar catálogo
Nos adaptamos a sus necesidades
FPS AUTOMATION propone soluciones personalizadas para cualquiera de sus solicitudes que tenga que ver con cargo de insertos, montaje y sistema de visión artificial para el control de la calidad.